
Posted on 10 February 2012 by Thomas Schöps
What is OpenOrienteering Mapper? OpenOrienteering Mapper is an open source cartography program which is specially aimed at drawing orienteering maps. It is intended as a free alternative to the current standard program for this task, OCAD. Its main advantages compared to it are:
Open Source: the program is completely free and I will never demand money for it. Every programmer can improve it.
Cross-platform: the program currently works on Windows, Mac OS X and Linux. An Android version is planned.
Status I am happy to announce the release of the first alpha version today. This version is primarily intended for interested developers and adventurous users who like to try new stuff and give feedback. Though it would be possible to draw most parts of an orienteering map with this alpha version, many comfort functions are missing and the program has not been tested extensively, so I do not recommend to start any mapping projects with it yet.
Download
Binaries for Windows: Mapper-alpha1.zip
Binaries for Mac OS X: Mapper-alpha1-mac.zip
Source for Windows and Linux: Mapper-alpha1-src.tar.gz
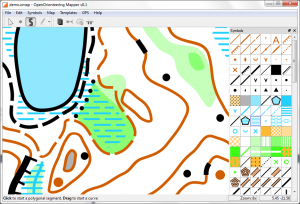
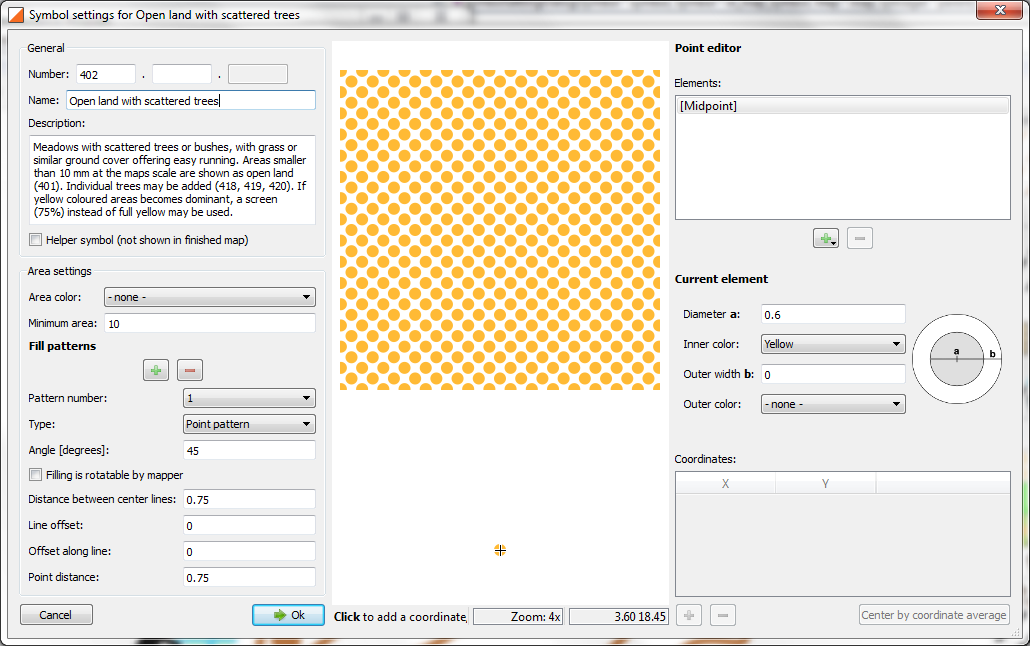
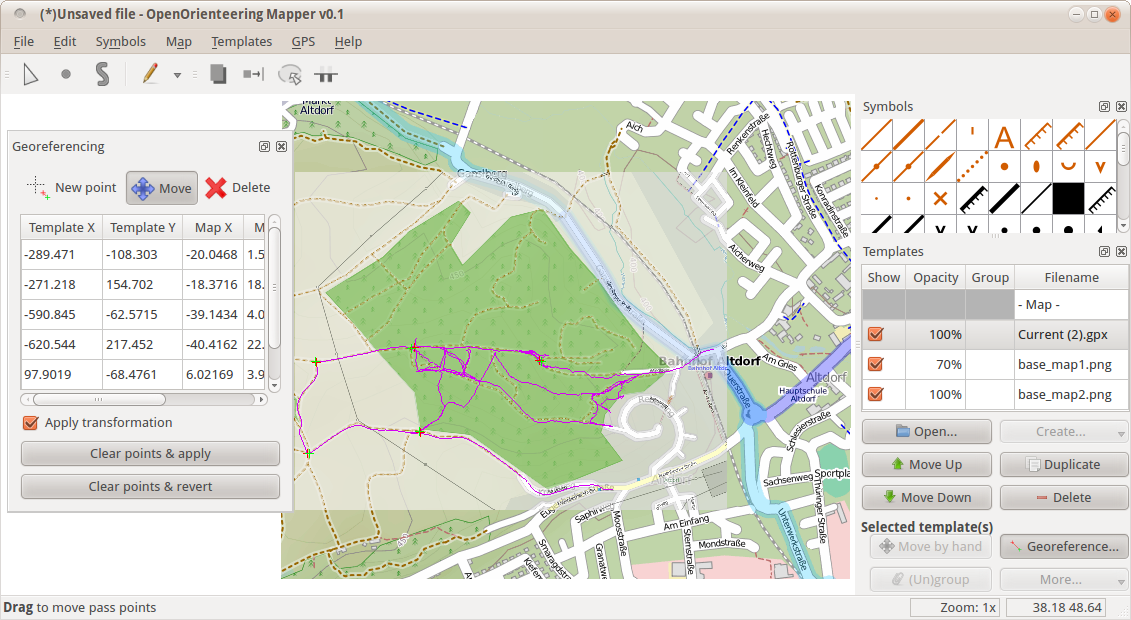
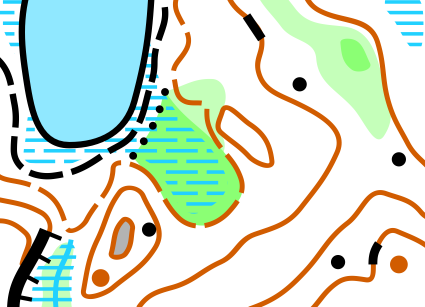
Screenshots
(Download map file, sample 600 dpi image export, sample pdf export)
Current feature overview
Definition of all symbol types relevant for orienteering maps: point, line, area, text and combined symbols
Loading and georeferencing of raster image and gpx track templates
Basic drawing and editing tools for points and paths (lines, areas and combined symbols) with live preview
Map printing, direct PDF and raster image export
Comes with ISOM 2000 foot-o symbol set (except overprinting symbols)
Plans The next goal will be to reach a state where the program can be recommended for mapping projects. I will probably release updated alpha versions from time to time. As soon as this is done, I plan to attempt the Android port, which should get an adapted user interface and make use of digital compasses and GPS devices.
You can find a detailed roadmap here. There is also a lengthy design document which describes some parts of the planned user interface of the desktop version.
Contributing If you like the project, you are welcome to contribute to it. Up to now, I worked on the project alone, but there is a lot to do and I’d appreciate any help. You do not need to be a programmer to help! Here are some ideas:
If you are not a programmer …
Try the alpha version and give feedback. Report any bugs you find to the bug tracker. Please make sure that the bug you report does not exist already. Currently the tracker contains all known bugs and the features planned for the first milestone.
Complete the symbol sets that come with the program. Currently there is only a (big) part of the ISOM 2000 symbol set. Suggestions are to complete this set, have a look at its color priorities and possibly suggest enhancements, to build the ISSOM 2007 sprint symbol set, or to build a school-o symbol set.
Write general documentation, “tips of the day”, or the in-application help.
Spread the word!
If you are a programmer …
The program is implemented in C++ using Qt. You can get the latest source from the git repository like this:
git clone git://git.code.sf.net/p/oorienteering/code oo-mapper
Again, some ideas:
Pick any item from the bug tracker.
Evaluate the Necessitas (Qt on Android) project, design and implement a mobile user interface for Android.
Or anything else that you find useful ;-)
In any case, be sure to send me an e-mail or leave a comment here in case you want to contribute!
If you want to stay updated on new developments, I recommend to check back here regularly or to read the RSS feed.
{kind=link}