 |
Mapper
0.9.0
API documentation
|
|
Mapper
0.9.0
API documentation
|
Pair of source and destination coordinates used to calculate transformations. More...
#include <transformation.h>
Public Member Functions | |
| void | save (QXmlStreamWriter &xml) const |
Static Public Member Functions | |
| static PassPoint | load (QXmlStreamReader &xml) |
Public Attributes | |
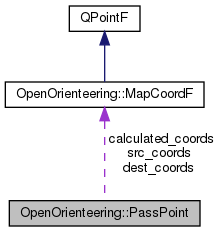
| MapCoordF | src_coords |
| Start position specified by the user. More... | |
| MapCoordF | dest_coords |
| End position specified by the user. More... | |
| MapCoordF | calculated_coords |
| Position where the point really ended up. More... | |
| double | error |
| Distance between dest_coords_map and calculated_coords; negative if not calculated yet. More... | |
Pair of source and destination coordinates used to calculate transformations.
|
static |
| void OpenOrienteering::PassPoint::save | ( | QXmlStreamWriter & | xml | ) | const |
| MapCoordF OpenOrienteering::PassPoint::calculated_coords |
Position where the point really ended up.
| MapCoordF OpenOrienteering::PassPoint::dest_coords |
End position specified by the user.
| double OpenOrienteering::PassPoint::error |
Distance between dest_coords_map and calculated_coords; negative if not calculated yet.
| MapCoordF OpenOrienteering::PassPoint::src_coords |
Start position specified by the user.
 1.8.13
1.8.13